
In the past few years civil engineering researchers in Texas and Sweden have been developing and modeling a whole new people transportation system, this system is based on shared autonomous vehicles (SAVs). This is a culmination of two of the strongest trends we have been witnessing this past decade: the sharing economy and autonomous vehicles (AVs). Soon we could replace 10-50% of current vehicles on the road with a roving fleet of connected SAVs. This is no longer science fiction, it could happen in the next decade. There are still engineering, regulatory and human prejudice based obstacles to overcome. Google, an AV leader, claims there will be consumer options by 2017-2018 and others predict some version of consumer AVs in the next five to fifteen years.
 Most major OEMs and technology companies are ploughing billions into R&D to bring a self driving car to the market. A lot of effort is being spent on producing a working prototype, which is of course necessary, but once the human driver is removed, then someone or something will have to tell the AV where to go. Once thousands of self driving vehicles are on the road, who or what is telling them where to go becomes the most critical aspect of the entire suite of technology. When there is no human driver, and the ownership of cars is shifted from individuals to organizations (public or private) the very structure of four wheeled transportation can be made to be fantastically more efficient. This is not speculation, there is already hard evidence demonstrating the possibilities.
Most major OEMs and technology companies are ploughing billions into R&D to bring a self driving car to the market. A lot of effort is being spent on producing a working prototype, which is of course necessary, but once the human driver is removed, then someone or something will have to tell the AV where to go. Once thousands of self driving vehicles are on the road, who or what is telling them where to go becomes the most critical aspect of the entire suite of technology. When there is no human driver, and the ownership of cars is shifted from individuals to organizations (public or private) the very structure of four wheeled transportation can be made to be fantastically more efficient. This is not speculation, there is already hard evidence demonstrating the possibilities.
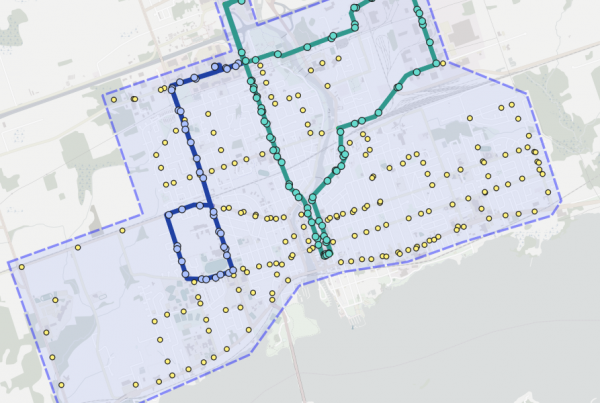
The research coming out of Texas in 2015, modeled a modestly sized SAV fleet (enough to provide only 1.3% of trips) operating in the downtown area of Austin, suggests that around 32,000 trips can be provided each day, with each SAV on the road replacing at least 9 conventional vehicles. This research is a proof of concept. Fagnant and Kockelman’s (2014), the same academics that developed the Austin simulations, have demonstrated how a SAV fleet could deliver a 19% return on an the operator’s investment, even with the highest assumed cost of building an AV. Therefore, once the requisite technology is ready the barriers to SAVs will not be economic.
Rather than twiddling our collective thumbs while we wait for functional and safe AVs, and the regulations to legally use them, there is much to do to prepare for the future. Who ever would like to own and deploy a fleet of autonomous vehicles should start modeling their potential system now. Starting with a sample of demand, based on their area, its geography, population density, market size and your overall budget. The size of the model does not matter. One could cover a small region of a city, or ambitiously try to model a system to cover an entire state’s transportation needs. In that last example, a fleet of 1.6 to 2.8 million self driving taxis were modeled to serve all the transportation demand of New Jersey. This compares favourably to the current number of personal vehicles in New Jersey (7.9 million).
 One only has to factor in this reduction in cars on the road to calculate the environmental benefits. These impressive numbers are largely caused by high levels of carsharing that these systems are encouraging. In fact, this is the critical component. On of the conclusions of Pierre-Jean Rigole’s (2014) paper on a SAV system for Stockholm, is that “in a scenario where users are not inclined to accept any reduced level of service, i.e. ridesharing (no co-passenger) and no delay, a SAV-based personal transport system will increase road traffic and environmental impact. It is not good enough to automate our vehicles, for desirable results we must also share them.”
One only has to factor in this reduction in cars on the road to calculate the environmental benefits. These impressive numbers are largely caused by high levels of carsharing that these systems are encouraging. In fact, this is the critical component. On of the conclusions of Pierre-Jean Rigole’s (2014) paper on a SAV system for Stockholm, is that “in a scenario where users are not inclined to accept any reduced level of service, i.e. ridesharing (no co-passenger) and no delay, a SAV-based personal transport system will increase road traffic and environmental impact. It is not good enough to automate our vehicles, for desirable results we must also share them.”
The good news that SAVs are consumer friendly. Average wait times for pickup are between 1.0 and 5.0 minutes, the average price for consumers was one third of an average taxi fare, just $5.64 per trip, or about $1.0 a mile. At these prices and service levels people should not mind being in shared sedans and vans that they are not in control of. A system such as this will require a powerful routing and dispatching algorithm to autonomously control the fleet and a smartphone application to connect cars to riders. SAV systems can and should be modeled now by organizations with the resources deploy large fleets, the Austin Texas simulations found fleet sizes of around 2000-2500 vehicles to be most efficient and had the highest rates of return on investment. For all unique cases these types of models must be replicated to ensure we know how many AVs to purchase, this will aid the immediately transition to an economical and environmentally sound automated transportation system. Or else the only thing AVs will become is another expensive gadget for the privileged.
Feature photo: Jurvetson – Wikipedia
Middle photo: Google 2013
Bottom photo: Eric Risberg/AP – The Guardian [/fusion_builder_column][/fusion_builder_row][/fusion_builder_container]

{kind=link}